

1 Allgemeine Informationen
In Dienst gestellt: 2368
Klassifikation:Runabout
Mission
 Kleiner als viele Raumschiffe, aber größer als ein typisches Shuttle, erfüllen die Runabouts eine wichtige Rolle innerhalb der Sternenflotte. Das Projekt der Danube-Klasse war die Folge einer Reihe von Studien, die 2363 vom Advanced Starship Design Bureau (ASDB) auf der Suche nach einem Schiff durchgeführt wurden, das eine große Bandbreite von Wissenschafts-, Nachschub- und Personentransportmissionen erfüllen konnte. Laut Benennung ist das Schiff technisch gesehen kein Shuttle (daher also die Kennzeichnung mit "U.S.S." und die Verwendung einer individuellen NCC-Registrierung für jeden Runabout). Das Runabout der Danube-Klasse kann die Flotte bei speziellen Aufgaben hervorrangend ergänzen. Viele vorangegangenen Raumschiffkonzepte flossen in den Bau der Danube-Klasse mit ein - mit dem Ziel, das wendigste und beste Kurzstreckenschiff zu entwickeln, das bestimmte, zeitlich begrenzte Aufträge unterstützen sollte. Die spezifischen Missionsziele und Fähigkeiten des Runabouts der Danube-Klasse umfassen u.a.:
Kleiner als viele Raumschiffe, aber größer als ein typisches Shuttle, erfüllen die Runabouts eine wichtige Rolle innerhalb der Sternenflotte. Das Projekt der Danube-Klasse war die Folge einer Reihe von Studien, die 2363 vom Advanced Starship Design Bureau (ASDB) auf der Suche nach einem Schiff durchgeführt wurden, das eine große Bandbreite von Wissenschafts-, Nachschub- und Personentransportmissionen erfüllen konnte. Laut Benennung ist das Schiff technisch gesehen kein Shuttle (daher also die Kennzeichnung mit "U.S.S." und die Verwendung einer individuellen NCC-Registrierung für jeden Runabout). Das Runabout der Danube-Klasse kann die Flotte bei speziellen Aufgaben hervorrangend ergänzen. Viele vorangegangenen Raumschiffkonzepte flossen in den Bau der Danube-Klasse mit ein - mit dem Ziel, das wendigste und beste Kurzstreckenschiff zu entwickeln, das bestimmte, zeitlich begrenzte Aufträge unterstützen sollte. Die spezifischen Missionsziele und Fähigkeiten des Runabouts der Danube-Klasse umfassen u.a.:
- Kurze Reaktionszeiten beim Transport wissenschaftlicher Expeditionen
- Orbitale oder planetarische Basis für wissenschaftliche Missionen
- Transport von Versuchs- und Frachtmodulen
- Notfalleinsätze und taktische Missionen
Die Missionsziele werden lediglich durch begrenzte Treibstoffvorräte und Verbrauchsgüter eingeschränkt.
Charakteristika
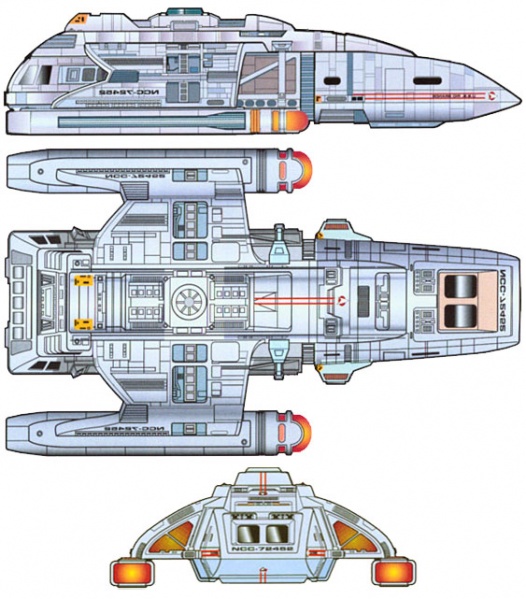 Die verhältnismäßig große Vielseitigkeit des Runabout der Danube-Klasse geht auf eine einzigartigen Multimissionsmodulbauweise zurück: Ein austauschbares Bauteil, bestehend aus vier Modulen, die mittschiffs zwischen den Antriebssystemen platziert sind, kann aus dem Fahrzeug herausgenommen und durch das für eine Mission erforderliche Bauteil ersetzt werden. Das Fahrzeug kann so konfiguriert werden, dass es eine große Brandbreite von Missionsparametern erfüllen kann. Ein anderes einzigartiges Kennzeichen der Danube-Klasse ist die Cockpitsektion, die im Notfall als Rettungsboot vom Schiff abgetrennt werden und in einem stark begrenzten Umfang selbstständig im All operieren oder auf einem Planeten notlanden kann. Mikrotorpedorampen unterstützen die Verteidigungsvorrichtungen des Schiffes. Zusätzlich spezialisierte Trägergehäuse, die auf dem Runabout platziert werden, stehen für verschiedene spezifische Missionsziele zur Verfügung. Dazu zählen Kommunikationsgehäuse, ECMs (Elektronische Gegenmaßnahmen), Depots für Phaser, Photonentorpedos und Sensoren.
Die verhältnismäßig große Vielseitigkeit des Runabout der Danube-Klasse geht auf eine einzigartigen Multimissionsmodulbauweise zurück: Ein austauschbares Bauteil, bestehend aus vier Modulen, die mittschiffs zwischen den Antriebssystemen platziert sind, kann aus dem Fahrzeug herausgenommen und durch das für eine Mission erforderliche Bauteil ersetzt werden. Das Fahrzeug kann so konfiguriert werden, dass es eine große Brandbreite von Missionsparametern erfüllen kann. Ein anderes einzigartiges Kennzeichen der Danube-Klasse ist die Cockpitsektion, die im Notfall als Rettungsboot vom Schiff abgetrennt werden und in einem stark begrenzten Umfang selbstständig im All operieren oder auf einem Planeten notlanden kann. Mikrotorpedorampen unterstützen die Verteidigungsvorrichtungen des Schiffes. Zusätzlich spezialisierte Trägergehäuse, die auf dem Runabout platziert werden, stehen für verschiedene spezifische Missionsziele zur Verfügung. Dazu zählen Kommunikationsgehäuse, ECMs (Elektronische Gegenmaßnahmen), Depots für Phaser, Photonentorpedos und Sensoren.
Hintergrund
Erste Testflüge der Runabouts der Danube-Klasse erwiesen sich als so erfolgreich, dass man unmittelbar nach Vollendung der Testphase mit der Produktion begann. 2368 in Dienst gestellt, wurden die Runabouts aus der ersten Produktionsreihe der Station Deep Space Nine im bajoranischen Sektor zugeteilt. Diese ersten Runabouts zeichneten sich selbst schnell in einer Reihe von Missionen aus. Die wohl herausrangendste Mission war der Erstkontakt mit den bajoranischen Wurmlochwesen. Bemerkenswerterweise ist nach sieben Jahren nur noch ein Runabout von den ursprünglich vier auf DS9 stationierten im Dienst: Die USS Rio Grande NCC-74252. Alle anderen Runabouts, die damals DS9 zugewiesen wurden, sowie zahlreiche Nachfolgerunabouts wurden entweder stark beschädigt oder zerstört.
Die Produktion der Danube-Klasse hält noch immer an, auch wenn die Sternenflotte mittlerweile dabei ist, mögliche Nachfolgeschiffe zu entwerfen.
| Allgemeine Spezifikationen - Basis | Allgemeine Spezifikationen - Torpedomodul |
| Stand: 2368 | Stand: 2368 |
| Abmessungen: Länge: 23,1 Meter Breite: 13,7 Meter Höhe: 5,4 Meter |
Abmessungen: Länge: 23,1 Meter Breite: 13,7 Meter Höhe: 6,7 Meter |
| Masse: 158,7 metrische Tonnen | Masse: 168,7 metrische Tonnen |
| Besatzung:
Gesamt: 1 Pilot + zusätzliche Mannschaft, falls erforderlich |
Besatzung:
Gesamt: 1 Pilot + zusätzliche Mannschaft, falls erforderlich |
| Außenhülle: Leichte Duranium-/Tritanium Doppel-Verbundshülle | Außenhülle: Leichte Duranium-/Tritanium Doppel-Verbundshülle |
| Antriebssysteme:
Warpantriebssystem: (2) LF-7X2 verbesserte lineare Warpfeldgondeln Impulsantriebssystem: (2) FIB-3 fusionsbetriebene Impulsantriebssysteme |
Antriebssysteme:
Warpantriebssystem: (2) LF-7X2 verbesserte lineare Warpfeldgondeln Impulsantriebssystem: (2) FIB-3 fusionsbetriebene Impulsantriebssysteme |
| Warpgeschwindigkeiten:
Reisegeschwindigkeit: Warp 4,0 Höchstgeschwindigkeit: Warp 4,7 für 36 Stunden |
Warpgeschwindigkeiten:
Reisegeschwindigkeit: Warp 4,0 Höchstgeschwindigkeit: Warp 4,7 für 36 Stunden |
| Bewaffnung:
Primärbewaffnung: (6) Typ-VI Phaserbänke Sekundärbewaffnung: (2) Mk-25 Mikrophotonentorpedorampen, 2 Rohre Standardbelastung von 20 Gehäusen |
Bewaffnung:
Primärbewaffnung: (6) Typ-VI Phaserbänke Sekundärbewaffnung: (4) Mk-25 Mikrophotonentorpedorampen, 4 Rohre Standardbelastung von 40 Gehäusen |
| Verteidigungssysteme: FSQ-2 Primäres Deflektorschildsystem | Verteidigungssysteme: FSQ-2 Primäres Deflektorschildsystem |
| Computersystem: M-15-III Isolineares Computersystem | Computersystem: M-15-III Isolineares Computersystem |
| Missionsdauer:
Standardmission: 1-2 Wochen Empfohlene Generalüberholung: Nach 15 Monaten |
Missionsdauer:
Standardmission: 1-2 Wochen Empfohlene Generalüberholung: Nach 15 Monaten |